
 This is a follow-up for my previous post about installation of OpenCV and Python on Orange Pi board. Here we are going to attach a USB webcam to Orange Pi single board computer and write Python code to access this webcam under OpenCV computer vision library. I’m going to use Acme CA-03 USB webcam, but actually any general purpose webcam should work. Continue reading “Getting video stream using Python and OpenCV from a webcam attached to Orange Pi”
This is a follow-up for my previous post about installation of OpenCV and Python on Orange Pi board. Here we are going to attach a USB webcam to Orange Pi single board computer and write Python code to access this webcam under OpenCV computer vision library. I’m going to use Acme CA-03 USB webcam, but actually any general purpose webcam should work. Continue reading “Getting video stream using Python and OpenCV from a webcam attached to Orange Pi”
Install OpenCV and Python on Orange Pi PC Plus SBC
 In this walk-through we are going to install OpenCV 2.4 open source computer vision library and Python 2.7 programming language to Orange Pi model PC Plus. It was checked for Armbian (Jessy) and Ubuntu Vivid Mate, however should work also for other distros. This walk-through is inspired by tutorial for Raspberry Pi from Adrian Rosebrock and resembles its structure while adding packages needed for Orange Pi. The whole process will Continue reading “Install OpenCV and Python on Orange Pi PC Plus SBC”
In this walk-through we are going to install OpenCV 2.4 open source computer vision library and Python 2.7 programming language to Orange Pi model PC Plus. It was checked for Armbian (Jessy) and Ubuntu Vivid Mate, however should work also for other distros. This walk-through is inspired by tutorial for Raspberry Pi from Adrian Rosebrock and resembles its structure while adding packages needed for Orange Pi. The whole process will Continue reading “Install OpenCV and Python on Orange Pi PC Plus SBC”
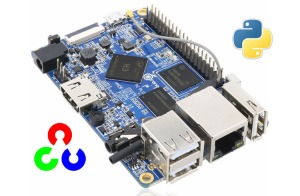
Meet the new Orange Pi PC Plus
 Orange Pi is a relatively new player in single board computer (SBC) market. Most of their boards entered the market in the beginning of 2015, with two models added in January 2016 and two models in April 2016. The boards are sold via AliExpress store at a price tag from 10$ to 50$ depending on configuration. Due to low prices these boards become more and more popular. Here I will review Orange Pi PC Plus that was released in April 2016 and costs 20$. The feature set of this board is impressive and Continue reading “Meet the new Orange Pi PC Plus”
Orange Pi is a relatively new player in single board computer (SBC) market. Most of their boards entered the market in the beginning of 2015, with two models added in January 2016 and two models in April 2016. The boards are sold via AliExpress store at a price tag from 10$ to 50$ depending on configuration. Due to low prices these boards become more and more popular. Here I will review Orange Pi PC Plus that was released in April 2016 and costs 20$. The feature set of this board is impressive and Continue reading “Meet the new Orange Pi PC Plus”
Sensing current with ASC712 connected to Arduino
 In many setups we may need to measure the amount of current consumed by the system or its components. An inexpensive and convenient way of doing this is by using module like the one shown on the right. This module uses ASC712 chip for the job. There are three versions Continue reading “Sensing current with ASC712 connected to Arduino”
In many setups we may need to measure the amount of current consumed by the system or its components. An inexpensive and convenient way of doing this is by using module like the one shown on the right. This module uses ASC712 chip for the job. There are three versions Continue reading “Sensing current with ASC712 connected to Arduino”
Arduino Mega 2560 R3
In this post we are reviewing the resources of Arduino Mega 2560 R3 board and their applicability to LYNX robot platform. Arduino are a low-cost microcontrollers and Mega 2560 board is positioned as applicable for robotics. Arduino is programmed in C/C++ that is a nice feature of this low-cost microcontroller.
General description of the board is available at Arduino website. Here we will focus on the resources that Continue reading “Arduino Mega 2560 R3”
Powering the mobile robot
Providing power to the robot seems to be a straightforward issue, – take the battery and connect it to the robot. However there are issues that need special attention. Let’s take a closer look at them.
 Most common is to use accumulators for mobile robot. There are different types of them available, – NiMH, Lead Acid and LiPo are the most popular. Basics about accumulators could be found here and here.
Most common is to use accumulators for mobile robot. There are different types of them available, – NiMH, Lead Acid and LiPo are the most popular. Basics about accumulators could be found here and here.
Main factors to consider are maximum Continue reading “Powering the mobile robot”
Low cost motor controller (H-Bridge) for LYNX robot platform (based on L298N chip)
 LYNX platform is mobile and needs motors to move around the room. Should we connect motors directly to the Arduino microcontroller? Definitely not! Motors require high currents for their operations and Arduino is not able to provide such currents. How should we connect the motors then? Right, via motor controller.
LYNX platform is mobile and needs motors to move around the room. Should we connect motors directly to the Arduino microcontroller? Definitely not! Motors require high currents for their operations and Arduino is not able to provide such currents. How should we connect the motors then? Right, via motor controller.
Motor controller is used to control Continue reading “Low cost motor controller (H-Bridge) for LYNX robot platform (based on L298N chip)”
Chassis
 Robot chassis consists of a frame to which microcontroller, driving motors, servos, sensors and other parts are attached.
Robot chassis consists of a frame to which microcontroller, driving motors, servos, sensors and other parts are attached.
The selection of chassis for the robot is rather complex task and various factors should be taken into account. Many of the factors are related to the environment in which the robot will be operated. Will it be indoors or outdoors? Is surface flat, rough, horizontal, sloped or anything else? What are the obstacles and their type? In addition to the environment the selection of chassis will depend on Continue reading “Chassis”
Welcome to LYNX
In the following series of posts I will show how to design, build and program a complex robot platform – LYNX. The idea behind is to build the robot capable of assisting a human in selected tasks at home.
These tasks include moving and sorting out small items, monitoring environment and notifying about unfavorable conditions and providing audio/video communication.
To be able to do the above tasks the LYNX needs to Continue reading “Welcome to LYNX”
